
STA-B0610X on 6 km:n silmälle turvallinen laseretäisyysmittarin (LRF) etäisyydenmittausmoduuli, joka voi havaita kohteen etäisyyden ja lähettää mitatun etäisyyden ylempään tietokoneeseen sarjaliikenteen kautta. Näkyvyys ≥ 15 km, kohteen heijastuskyky ≥ 0,3, kosteus ≤ 80 %, ajoneuvon (2,3 m × 2,3 m NATO-kohde) toimintaetäisyys ≥ 6 km; maksimietäisyys ≥ 10 km.
(1) Yksittäinen ja jatkuva etäisyys;
(2) Vastaa laseretäisyyskäskyihin ja voi lopettaa etäisyyden milloin tahansa pysäytyskomennon mukaisesti;
(3) Lähettää etäisyystiedot ja tilatiedot kerran pulssia kohden etäisyyden mittauksen aikana;
(4) Se voi raportoida lähetettyjen laserpulssien kumulatiivisen määrän (ei tehokatkoksia);
(5) etäisyyden valinta, etu- ja takakohteen ilmaisin;
(6) Itsetestaustoiminto.
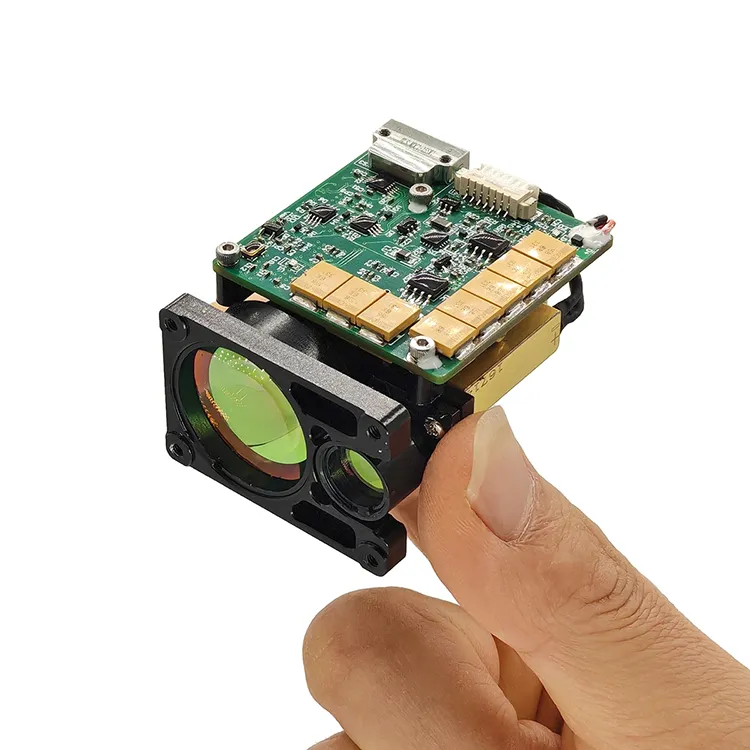
Laseretäisyysmittari B0610X on sotilaallinen pulssilaseretäisyysmittari, joka on suunniteltu sovellusskenaarioihin, kuten lentokoneisiin, miehittämättömiin ilma-aluksiin, tankkeihin ja kaukoputkeen. 6 km silmälle turvallisella laseretäisyysmittarilla (LRF) on pieni koko, kevyt, alhainen virrankulutus, vakaa suorituskyky, pitkä mittausetäisyys ja pitkä käyttöikä, ihmissilmäturvallisuus ja muut edut, se on tärkeä tekninen laite tuotteen kohdistustarkkuuden parantamiseksi.
Tuotteen suorituskykyindeksi B0610X Eye Safe LRF-moduulille
| Tuote | Tekninen parametri | Ohje |
| Malli | STA-B0610X | |
| Toimiva aallonpituus | 1535±5nm | |
| Silmien turvallisuus | Luokka 1 (IEC 60825-1) | |
| Vastaanottava aukko | Φ25mm | |
| Päästöaukko | Φ14mm | |
| Etäisyyskyky | 50m-8000m | |
| Kantavuusalue | ≥10000m | Suurin kantama, tarkkailijanäkyvyys 25 km |
| ≥8000m | Rakennuskohteet, Heijastuskyky: 0,6, Havaintonäkyvyys 25 km | |
| ≥6000m | Naton tavoite | |
| ≥3000m | Ihmisen kohde | |
| ≥1000m | UAV-kohde | |
| Mini Range | 50m | |
| Monen kohteen tunnistus | Jopa 3 tavoitetta | |
| Alueen tarkkuus | ±1 m | 3δ |
| Vaihtelutaajuus | 1-10Hz säädettävissä | |
| Tarkkuusaste | ≥ 98 % | |
| Väärien hälytysten määrä | 1 % | |
| Divergenssikulma | ≤0,5 mrad | |
| Viestintäliittymä | RS422 | TTL/RS232-liitäntä voidaan mukauttaa |
| Jännite | 5-12V | |
| Työvoima | ≤1,2W(@1hz) | Normaali lämpötilatesti |
| valmiustilan virta | ≤0,5W | PWR EN Pin, valmiustila 0,1W |
| Mekaaninen isku | 75g, 1ms | |
| Työlämpötila | -40℃~+60℃ | |
| Varastointilämpötila | -45℃~+70℃ | |
| Luotettavuus | MTBF ≥ 1500h | |
| Koko | ≤65mm × 35mm × 44mm | |
| Paino | ≤75 g | |
| Päätoiminto | Ensimmäinen ja viimeinen kohdealue, Monia kohdealueita, Etäisyyden selektiivisyys |
|
Huomautuksia:
1) Naton kohteen koko 2,3 m × 2,3 m; Ihmisen kohteen koko 0,5 m × 1,7 m; UAV-kohteen koko 0,2 m × 0,3 m; Heijastuskyky 30%, tarkkailijan näkyvyys≥ 15 km

| pin | määritelmä | selittää |
| 1 | GND | merkkijono |
| 2 | Virta on | Virtalähde, 3-5 V |
| 3 | UART_NC | (tyhjä) |
| 4 | UART_TX | Sarjaportin lähetin, TTL_3.3V taso |
| 5 | UART_RX | Sarjaportin vastaanottopää, TTL_3.3V-tasolla |
| 6 | POWER_ON | Moduulin virtakytkin, TTL_3.3V taso; (> 0,7 V päällä, < 0,15 V pois päältä oletuksena) |
| Pin | Määritelmä | Toiminto | Huomautuksia |
| 1 | RX+ | RS422 vastaanotin + | Sininen |
| 2 | RX- | RS422 vastaanotin - | Vihreä |
| 3 | TX- | RS422 siirto - | Violetti |
| 4 | TX+ | RS422 vaihteisto + | Keltainen |
| 5 | GND | Tiedonsiirtomaajohto | Valkoinen |
| 6 | VEE | Virtalähde + | Punainen |
| 7 | GND | Virtalähde - | Musta |
| 8 | PWR FI | / | Tuhka |
Ympäristöön sopeutumiskyky
a) työlämpötila:-40℃~+60℃.
b) Varastointilämpötila:-45℃~+70℃.
C) Satunnainen tärinä:15~2000Hz, 3 suuntaa. Erityiset testiolosuhteet on esitetty taulukossa 1.
Taulukko 1 Satunnaisen tärinätestin olosuhteet
| Sarjanumero | Taajuusalue (Hz) | Kiihtyvyyden spektritiheys (g2/Hz) | Tärinäaika (min) |
| 1 | 15-190 | 0.01 | Tärinä joka suuntaan 15 min |
| 2 | 190-210 | 0.1 | |
| 3 | 210-380 | 0.01 | |
| 4 | 380-420 | 0.025 | |
| 5 | 420-2000 | 0.01 |
OEM/ODM-moduulit ja mukautetut ratkaisut
B0610X on suunniteltu järjestelmäintegraattoreille, jotka etsivät kätevää, tehokasta ja kompaktia laseretäisyysratkaisua. Se tarjoaa luotettavan suorituskyvyn monissa sovelluksissa.
Se on erittäin pieni, ultrakevyt, sillä on alhainen virrankulutus ja se voidaan mitata pitkältä etäisyydeltä. Se sopii kädessä pidettäviin laitteisiin (lämpökuvaus), aseiden kiinnityssovelluksiin, kannettaviin järjestelmiin ja kevyisiin anturisarjoihin sekä miehittämättömiin ilma-aluksiin tai UGV-kohteisiin.
1. Lähetysprotokolla: asynkroninen sarjaliikenne;
2. Porttihinta: 115200;
3. Databitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yksi lopetusbitti, virheellinen vahvistus;
4. Tietorakenne: Data koostuu otsikkotavusta, komentoosasta, datan pituudesta, parametriosasta ja tarkistustavusta;
5. Tiedonsiirtotila: pääohjain lähettää ohjauskomennot etäisyysmittauskoneelle ja mittauskone vastaanottaa ja suorittaa käskyt. Etäisyystilassa etäisyysmittauskone lähettää mittauskoneen tiedot ja tilan takaisin ylemmälle tietokoneelle etäisyysmittausjakson mukaisesti. Viestintämuoto ja komennon sisältö näkyvät seuraavassa taulukossa.
A) Pääohjaus lähettää
Lähetettävän viestin muoto on seuraava:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Taulukko 2 Lähetetyn viestin muotokuvaus
| tilausnumero | nimi | selittää | koodi | huomautuksia |
| 1 | STX0 | Viestin aloituslippu | A5(H) | |
| 2 | CMD | CW | Katso taulukko 3 | |
| 3 | LEN | DL | Kaikkien tavujen määrä paitsi aloitusmerkki, komentosana ja tarkistussumma | |
| 4 | DATAH | parametri | Katso taulukko 3 | |
| 5 | DATAL | |||
| 6 | CHK | XOR-vahvistus | Kelvollista tavua lukuun ottamatta kaikki muut tavut ovat XOR-korjattuja |
Komento kuvataan seuraavasti:
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka isäntä lähettää etäisyysmittauskoneelle
| tilausnumero | CW | toiminto | datatavu | huomautuksia | pituus | Esimerkkikoodi |
| 1 | 0x00 | lopettaa | DATAH=00 (H) DATAL=00 (H) |
Etäisyysmittari lopettaa mittaamisen | Kuusi tavua | A5 00 02 00 00 A7 |
| 2 | 0x01 | Yksittäinen ulottuvuus | DATAH=00 (H) DATAL=00 (H) |
Kuusi tavua | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Jatkuva etäisyys | DATAH=XX(H) TIEDOT=YY (H) |
DATA kuvaa vaihteluväliä, ms | Kuusi tavua | A5 02 02 03 E8 4E (alue 1 Hz) |
| 4 | 0x03 | itsetarkistus | DATAH=00 (H) DATAL=00 (H) |
Kuusi tavua | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Aseta lähin etäisyys valintaan | DATAH=XX(H) TIEDOT=YY (H) |
DATA kuvaa sokean alueen arvoa, yksikkö 1m | Kuusi tavua | A5 04 02 00 64 C7 (100m on lähin etäisyys) |
| 6 | 0x06 | Valon tehokyselyiden kumulatiivinen määrä | DATAH=00 (H) DATAL=00 (H) |
Valon tehokyselyiden kumulatiivinen määrä | Kuusi tavua | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-virta on päällä | DATAH=00 (H) DATAL=00 (H) |
Kuusi tavua | A5 11 02 00 00 B6 | |
| 8 | 0x12 | APD-virta on pois päältä | DATAH=00 (H) DATAL=00 (H) |
Kuusi tavua | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Numerokysely | DATAH=00 (H) DATAL=00 (H) |
Numerokysely | Kuusi tavua | A5 EB 02 00 00 4C |
a) Pääohjain vastaanottaa muotoa
Vastaanotetun viestin muoto on seuraava:
| STX0 | CMD | LEN | DATAn | DATA0 | CHK |
Taulukko 4 Vastaanotettujen viestien muotokuvaus
| tilausnumero | nimi | selittää | koodi | huomautuksia |
| 1 | STX0 | Viestin aloituslippu 1 | A5 (H) | |
| 2 | CMD_JG | Datan komentosana | Katso taulukko 5 | |
| 3 | LEN | DL | Kaikkien tavujen määrä paitsi aloitusmerkki, komentosana ja tarkistussumma | |
| 4 | Dn | parametri | Katso taulukko 5 | |
| 5 | D0 | |||
| 6 | CHK | XOR-vahvistus | Kelvollista tavua lukuun ottamatta kaikki muut tavut ovat XOR-korjattuja |
Pääsäätimen vastaanottamisen tilakuvaus:
Taulukko 5 kuvaa datasanan, jonka etäisyysmittari lähettää pääohjaimelle
| tilausnumero | CW | toiminto | datatavu | huomautuksia | kokonaispituus |
| 1 | 0x00 | lopettaa | D1=00 (H) D0=00 (H) |
Kuusi tavua | |
| 2 | 0x03 | itsetarkistus | D8 ~ D1 | D8-D7: -5V jännite, yksikkö 0,01V. D6-D5: Kuolleen kulman arvo, yksikkö 1m D4: APD-suurjännitearvo, yksikkö V; D3: char-tyyppi, ilmaisee APD-lämpötilan, yksikkö: Celsius-astetta; D2-D1: +5V jännite, yksikkö 0,01V |
12 tavua |
| 3 | 0x04 | Etäisyys lähimpään pääsyasetukseen, yksikkö m | D1 D0 | DATA kuvaa lähimmän etäisyyden arvon, yksikkö 1m; Aloita korkealla ja lopeta matalalla |
Kuusi tavua |
| 4 | 0x06 | Valon tehokyselyiden kumulatiivinen määrä | D3-D0 | DATA ilmaisee valojen lukumäärän, 4 tavua, korkein tavu ensin | Seitsemän tavua |
| 5 | 0x11 | APD-virta on päällä | D1=00 (H) D0=00 (H) |
APD-virta on päällä | Kuusi tavua |
| 6 | 0x12 | APD-virta pois päältä | D1=00 (H) D0=00 (H) |
APD-virta on pois päältä | Kuusi tavua |
| 7 | 0xED | Ylityötä | 0x00 0x00 | Laser on lasertyöskentelysuojan alainen, eikä sitä voida mitata. | Kuusi tavua |
| 8 | 0xEE | Tehokkuusvirheet | 0x00 0x00 | Kuusi tavua | |
| 9 | 0XEF | Sarjaportin tiedonsiirron aikakatkaisu | 0x00 0x00 | Kuusi tavua | |
| 10 | 0x01 | Yhden etäisyyden mittaus (yksi tavoite, nolla toiselle ja kolmannelle kohteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 ensimmäinen kohdeetäisyys (yksikkö 0,1 m) D5-D3 etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas kohdeetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat läheltä kaukaa D9 (bit7-bit0) lipputavu: D9 on 7. paikka, joka osoittaa pääaallon; 1: on pääaalto, 0: ei pääaaltoa. D9 on 6. paikka, joka ilmaisee kaiun; 1: kaikua on, 0: ei kaikua D9 Viides asento osoittaa laserin tilan; 1: normaali laser, 0: laservika D9 on aikakatkaisulipun neljäs bitti, 1: normaali, 0: aikakatkaisu D9 ei kelpaa 3. asennossa (asetettu arvoon 1); D9 Toinen asento osoittaa APD-tilan; 1: normaali, 0: virhe D9 on ensimmäinen paikka, joka osoittaa, onko olemassa edellinen kohde; 1: edellinen kohde on, 0: ei aikaisempaa kohdetta (kohde sokealla alueella). D9 0. bitti osoittaa, onko olemassa seuraava kohde; 1: on myöhempi kohde, 0: ei myöhempää kohdetta (pääkohteen jälkeinen kohde on seuraava kohde) |
14 tavua |
| 11 | 0x02 | Jatkuva etäisyys (yksi tavoite, nolla toiselle ja kolmannelle kohteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 ensimmäinen kohdeetäisyys (yksikkö 0,1 m) D5-D3 etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas kohdeetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat läheltä kaukaa D9 (bit7-bit0) lipputavu: D9 on 7. bitti, joka ilmaisee pääaallon; 1: on pääaalto, 0: ei pääaaltoa. D9 on 6. paikka, joka ilmaisee kaiun; 1: kaikua on, 0: ei kaikua D9 Viides asento osoittaa laserin tilan; 1: normaali laser, 0: laservika D9 on aikakatkaisulipun neljäs bitti, 1: normaali, 0: aikakatkaisu D9 ei kelpaa 3. asennossa (asetettu arvoon 1); D9 Toinen paikka ilmaisee APD-tilan; 1: normaali, 0: virhe D9 on ensimmäinen paikka, joka osoittaa, onko olemassa edellinen kohde; 1: edellinen kohde on, 0: ei aikaisempaa kohdetta (kohde sokealla alueella). D9 0. bitti osoittaa, onko olemassa seuraava kohde; 1: on myöhempi kohde, 0: ei myöhempää kohdetta (pääkohteen jälkeinen kohde on seuraava kohde) |
14 tavua |
| 12 | 0xEB | Numerokysely | D17…… D0 | D17 D16 D15 D14 D13 D12 Koko koneen mallikoodi D11D10 Tuotenumero D9 D6 ohjelmistoversio D5 D4 APD-numero D3 D2 Lasernumero FPGA:n versio D1 |
22 tavua |
| Huomautus: ① Määrittämätön datatavu/bitti, oletusarvo on 0; | |||||
Jos haluat lisätietoja tuotteistamme, ota yhteyttä Jioptikiin.